一、接線圖:
超音波模組(HC-SR04) 是一個利用超音波來測量距離,
可以探測的距離為 2cm-400cm,精度為 0.3 cm,感應角度為 15 度

| HC-SR04 |
Arduino
|
Vcc
|
+5V
|
Trig (控制端)
|
7
|
Echo (接收端)
|
8
|
GND
|
GND
|
用SensorBoard 外接腳位圖

我們需要用到傳2個資料腳位,一個是trig 端,另一個是echo 端。
其中trig 接在D7 echo 接在D8


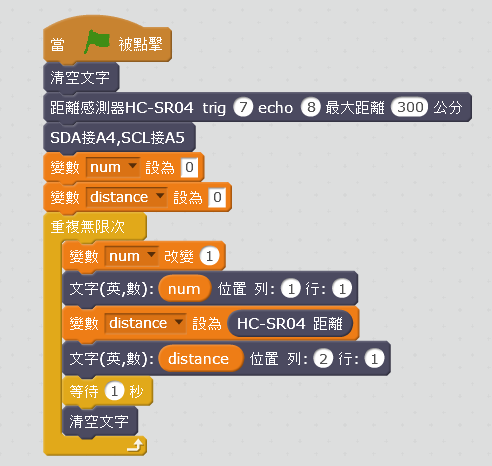
三、程式碼
先進行測試,執行後如果有看到數值代表感測器正常運作。


每一秒測量一次,並顯示所測量的距離於lcd的第二列上。
四、學生作業
1.請利用此裝置設計一個倒車雷達,當距離小於50cm,發出Do 的音20ms 3次。51~80發出Do的音 500ms 1次。
2.請利用此裝置設計一個倒車雷達,可以利用可變電阻(A0)來調整「設定值」當測量的距離< 設定值,發Mi 的音20ms 1次, 並閃紅燈2次。
1.請利用此裝置設計一個倒車雷達,當距離小於50cm,發出Do 的音20ms 3次。51~80發出Do的音 500ms 1次。
2.請利用此裝置設計一個倒車雷達,可以利用可變電阻(A0)來調整「設定值」當測量的距離< 設定值,發Mi 的音20ms 1次, 並閃紅燈2次。









